预约演示
更新于:2025-08-29
Lepu Medical Technology (Beijing) Co., Ltd.
更新于:2025-08-29
概览
标签
肿瘤
其他疾病
泌尿生殖系统疾病
小分子化药
ADC
单克隆抗体
疾病领域得分
一眼洞穿机构专注的疾病领域

技术平台
公司药物应用最多的技术
靶点
公司最常开发的靶点
关联
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |

靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
NCT07054307
MRG003 Plus HX008 as First-Line Treatment for EGFR-Positive Locally Advanced or Metastatic Penile Squamous Cell Carcinoma: A Prospective, Single-Arm, Phase I Clinical Trial
CTR20252486
评估 MWN109 注射液在中国非糖尿病的超重或肥胖参与者中多次皮下给药的安全性、耐受性、药代动力学及初步有效性的随机、双盲、安慰剂对照Ⅰb 期临床研究
CTR20252244
评估 MWN109 片在中国研究参与者中单、多次口服给药的安全性、耐受性、药
代动力学和进餐时间影响的随机、双盲、安慰剂对照 I 期临床研究
100 项与 乐普(北京)医疗器械股份有限公司 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2025-02-01BIOMATERIALS
Tailored extracellular matrix-mimetic coating facilitates reendothelialization and tissue healing of cardiac occluders
Article
作者: Yang, Li ; Hu, Jinpeng ; Yang, Xia ; Qin, Yumei ; Wang, Jian ; Jiang, Qing ; Wang, Yunbing ; Wu, Haoshuang ; Luo, Rifang ; Lu, Lu ; Chen, Juan ; Zhang, Bo ; Wang, Fan ; Zhang, Xingdong ; Zhu, Yun
Minimally invasive transcatheter interventional therapy utilizing cardiac occluders represents the primary approach for addressing congenital heart defects and left atrial appendage (LAA) thrombosis. However, incomplete endothelialization and delayed tissue healing after occluder implantation collectively compromise clinical efficacy. In this study, we have customized a recombinant humanized collagen type I (rhCol I) and developed an rhCol I-based extracellular matrix (ECM)-mimetic coating. The innovative coating integrates metal-phenolic networks with anticoagulation and anti-inflammatory functions as a weak cross-linker, combining them with specifically engineered rhCol I that exhibits high cell adhesion activity and elicits a low inflammatory response. The amalgamation, driven by multiple forces, effectively serves to functionalize implantable materials, thereby responding positively to the microenvironment following occluder implantation. Experimental findings substantiate the coating's ability to sustain a prolonged anticoagulant effect, enhance the functionality of endothelial cells and cardiomyocyte, and modulate inflammatory responses by polarizing inflammatory cells into an anti-inflammatory phenotype. Notably, occluder implantation in a canine model confirms that the coating expedites reendothelialization process and promotes tissue healing. Collectively, this tailored ECM-mimetic coating presents a promising surface modification strategy for improving the clinical efficacy of cardiac occluders.
2024-05-01CNS Neuroscience & Therapeutics
The biological behavior and clinical outcome of pituitary adenoma are affected by the microenvironment
Review
作者: Gao, Wei ; Li, Yuhe ; Ren, Xiufang ; Cheng, Quan ; Cai, Ruikai ; Liu, Tianqi ; Chen, Xin ; Jiang, Daoming ; Wu, Anhua ; Wu, Jianqi ; Cheng, Wen ; Chen, Chong
Abstract:
Background:
Pituitary adenoma is one of the most common brain tumors. Most pituitary adenomas are benign and can be cured by surgery and/or medication. However, some pituitary adenomas show aggressive growth with a fast growth rate and are resistant to conventional treatments such as surgery, drug therapy, and radiation therapy. These tumors, referred to as refractory pituitary adenomas, often relapse or regrow in the early postoperative period. The tumor microenvironment (TME) has recently been identified as an important factor affecting the biological manifestations of tumors and acts as the main battlefield between the tumor and the host immune system.
Main body:
In this review, we focus on describing TME in pituitary adenomas and refractory pituitary adenomas. Research on the immune microenvironment of pituitary adenomas is currently focused on immune cells such as macrophages and lymphocytes, and extensive research and experimental verifications are still required regarding other components of the TME. In particular, studies are needed to determine the role of the TME in the specific biological behaviors of refractory pituitary adenomas, such as high invasion, fast recurrence rate, and high tolerance to traditional treatments and to identify the mechanisms involved.
Conclusion:
Overall, we summarize the similarities and differences between the TME of pituitary adenomas and refractory pituitary adenomas as well as the changes in the biological behavior of pituitary adenomas that may be caused by the microenvironment. These changes greatly affect the outcome of patients.
2024-02-01Gastrointestinal endoscopy
Novel miniature transendoscopic telerobotic system for endoscopic submucosal dissection (with videos)
Article
作者: Ren, Hongliang ; Yang, Xiaoyun ; Ji, Rui ; Gao, Huxin ; Sun, Lining ; Zhou, Zhifeng ; Li, Yanqing ; Zuo, Xiuli ; Fu, Shichen ; Yang, Xiaoxiao ; Liu, Huicong ; Luan, Nan ; Yang, Jialin ; Hou, Cheng ; Sun, Liping
BACKGROUND AND AIMS:
The lack of tissue traction and instrument dexterity to allow for adequate visualization and effective dissection were the main issues in performing endoscopic submucosal dissection (ESD). Robot-assisted systems may provide advantages. In this study we developed a novel transendoscopic telerobotic system and evaluated its performance in ESD.
METHODS:
A miniature dual-arm robotic endoscopic assistant for minimally invasive surgery (DREAMS) was developed. The DREAMS system contained the current smallest robotic ESD instruments and was compatible with the commercially available dual-channel endoscope. After the system was established, a prospective randomized controlled study was conducted to validate the performance of the DREAMS-assisted ESD in terms of efficacy, safety, and workload by comparing it with the conventional technique.
RESULTS:
Two robotic instruments can achieve safe collaboration and provide sufficient visualization and efficient dissection during ESD. Forty ESDs in the stomach and esophagus of 8 pigs were completed by DREAMS-assisted ESD or conventional ESD. Submucosal dissection time was comparable between the 2 techniques, but DREAMS-assisted ESD demonstrated a significantly lower muscular injury rate (15% vs 50%, P = .018) and workload scores (22.30 vs 32.45, P < .001). In the subgroup analysis of esophageal ESD, DREAMS-assisted ESD showed significantly improved submucosal dissection time (6.45 vs 16.37 minutes, P = .002), muscular injury rate (25% vs 87.5%, P = .041), and workload (21.13 vs 40.63, P = .001).
CONCLUSIONS:
We developed a novel transendoscopic telerobotic system, named DREAMS. The safety profile and technical feasibility of ESD were significantly improved with the assistance of the DREAMS system, especially in the narrower esophageal lumen.
2025-08-27
·贝壳社
带量采购生物类似药
2025-08-26
财报抗体药物偶联物引进/卖出免疫疗法
100 项与 乐普(北京)医疗器械股份有限公司 相关的药物交易
登录后查看更多信息
100 项与 乐普(北京)医疗器械股份有限公司 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2025年11月02日管线快照
管线布局中药物为当前组织机构及其子机构作为药物机构进行统计,早期临床1期并入临床1期,临床1/2期并入临床2期,临床2/3期并入临床3期
药物发现
1
14
临床前
临床申请批准
1
3
临床1期
临床2期
6
2
临床3期
批准上市
1
7
其他
登录后查看更多信息
当前项目
登录后查看更多信息
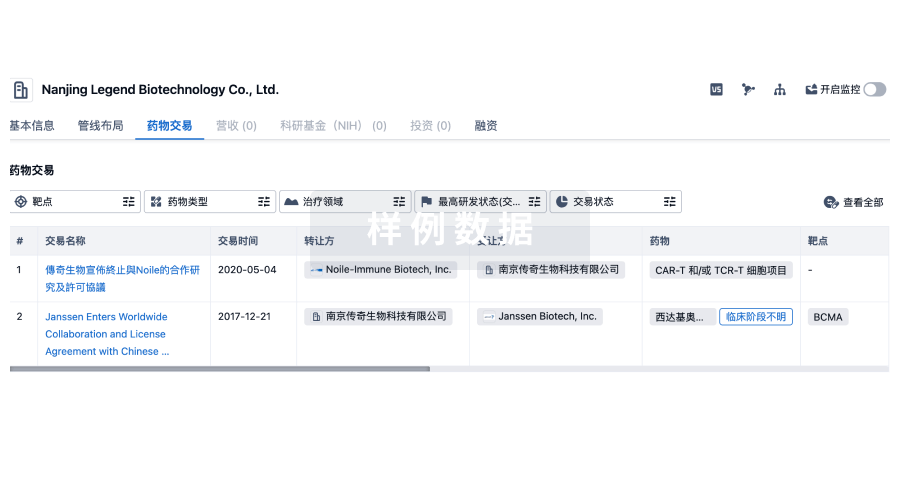
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
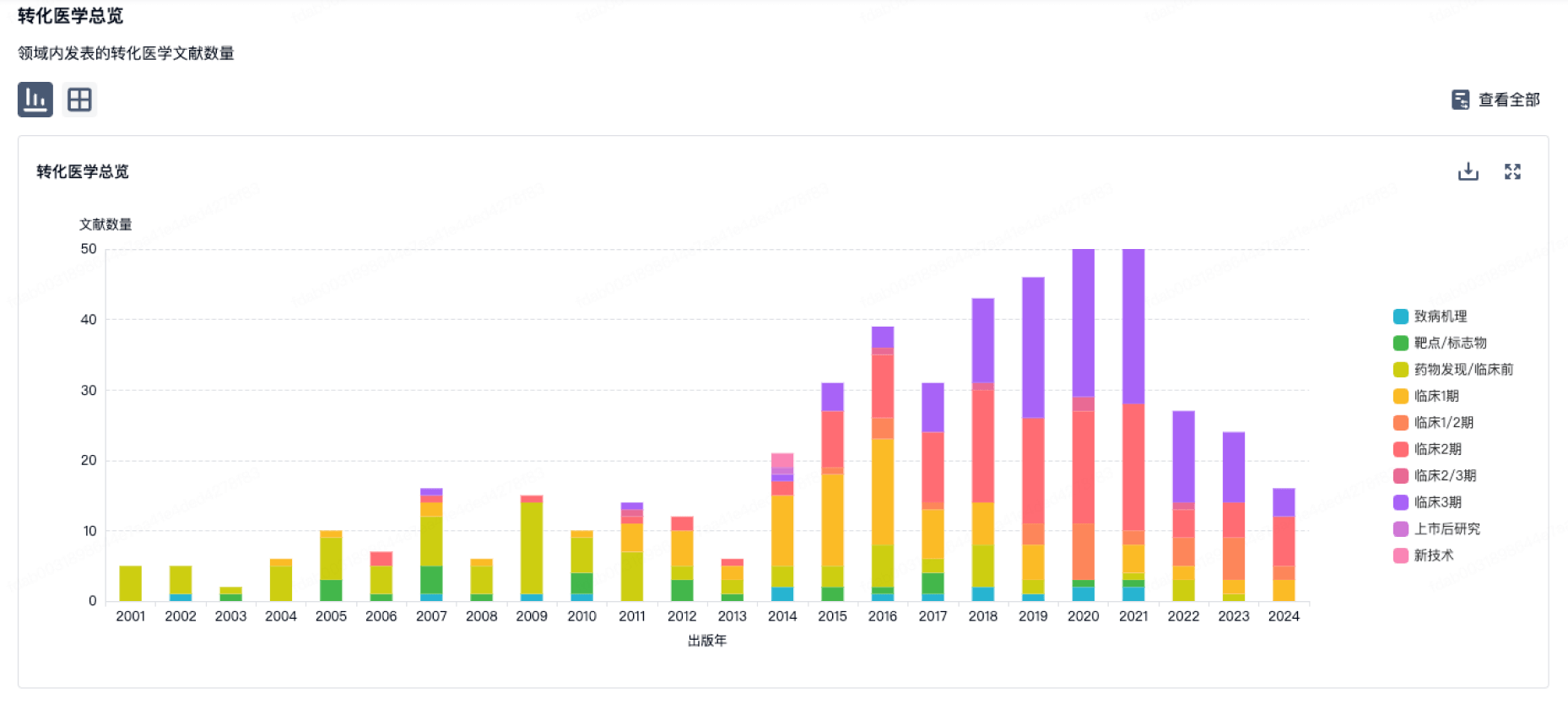
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
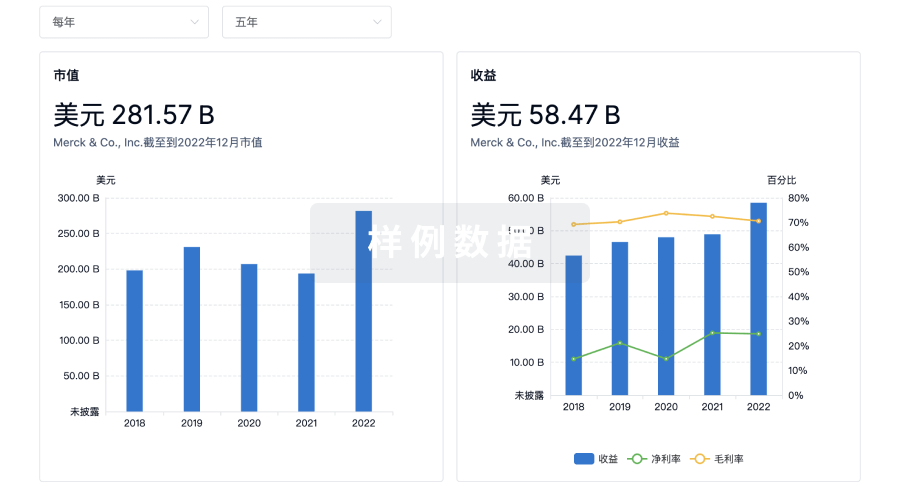
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或
融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
生物医药百科问答
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用