预约演示
更新于:2024-11-04
Otto Bock Healthcare Products GmbH
更新于:2024-11-04
概览
关联
16
项与 Otto Bock Healthcare Products GmbH 相关的临床试验NCT06045468
Observational Study on Early Rehabilitation After Transfemoral Amputation in Moderately Active Patients, Provided With Kenevo (Ottobock)
Treatment and rehabilitation after transfemoral amputation represents a challenging medical field, involving intersectoral parties. Although treatment guidelines exists, their implementation is difficult. This study is conducted to evaluate the need to practice these guidelines in order to gain best benefits for the patients. Focus is set of early inpatient rehabilitation and the role of a microprocessor-controlled prothesis (Kenevo, Ottobock).
开始日期2023-01-05 |
申办/合作机构 Median Co., Ltd. [+2] |
NCT05628064
Prospective, Feasibility Study to Evaluate Performance, Patient Benefits, and Acceptance of a New 1C70 Energy Storage and Return Prosthetic Foot
The objective of this study is to characterize the extend of 1C70 meeting the amputees needs in comparison with their everyday and a comparator foot, in regards of daily activities, mobility and balance, as well as quality of life and pain.
开始日期2022-11-21 |
申办/合作机构 |
NCT04784429
Assessing Outcomes With Microprocessor Knee Utilization in a K2 Population
Two-phased randomized controlled trial comparing the impact of microprocessor controlled knee prostheses (MPK) with the impact of non-microprocessor controlled knee prostheses (NPMK) in patients with a transfemoral/knee disarticulation level amputation categorized as K2 ambulators.
开始日期2021-06-11 |
100 项与 Otto Bock Healthcare Products GmbH 相关的临床结果
登录后查看更多信息
0 项与 Otto Bock Healthcare Products GmbH 相关的专利(医药)
登录后查看更多信息
26
项与 Otto Bock Healthcare Products GmbH 相关的文献(医药)2023-01-01·IEEE transactions on neural systems and rehabilitation engineering : a publication of the IEEE Engineering in Medicine and Biology Society
A Novel Sensory Feedback Approach to Facilitate Both Predictive and Corrective Control of Grasping Force in Myoelectric Prostheses
Article
作者: Russold, Michael F. ; Koppe, Mario ; Gasparic, Filip ; Jorgovanovic, Nikola ; Dosen, Strahinja ; Stanisic, Darko ; Hofer, Christian
Reliable force control is especially important when using myoelectric upper-limb prostheses as the force defines whether an object will be firmly grasped, damaged, or dropped. It is known from human motor control that the grasping of non-disabled subjects is based on a combination of anticipation and feedback correction. Inspired by this insight, the present study proposes a novel approach to provide artificial sensory feedback to the user of a myoelectric prosthesis using vibrotactile stimulation to facilitate both predictive and corrective processes characteristic of grasping in non-disabled people. Specifically, the level of EMG was conveyed to the subjects while closing the prosthesis (predictive strategy), whereas the actual grasping force was transmitted when the prosthesis closed (corrective strategy). To investigate if this combined EMG and force feedback is indeed an effective method to explicitly close the control loop, 16 non-disabled and 3 transradial amputee subjects performed a set of functional tasks, inspired by the "Box and Block" test, with six target force levels, in three conditions: no feedback, only EMG feedback, and combined feedback. The highest overall performance in non-disabled subjects was obtained with combined feedback (79.6±9.9%), whereas the lowest was achieved with no feedback (53±11.5%). The combined feedback, however, increased the task completion time compared to the other two conditions. A similar trend was obtained also in three amputee subjects. The results, therefore, indicate that the feedback inspired by human motor control is indeed an effective approach to improve prosthesis grasping in realistic conditions when other sources of feedback (vision and audition) are not blocked.
2022-11-20·Disability and rehabilitation2区 · 医学
The effect of microprocessor controlled exo-prosthetic knees on limited community ambulators: systematic review and meta-analysis
2区 · 医学
Review
作者: Kannenberg, Andreas ; Prager, Melanie ; Bueschges, Simon ; Hahn, Andreas
PURPOSE:
The clinical benefits of microprocessor-controlled prosthetic knees (MPKs) in community ambulators have been well-established. A systematic review in limited community ambulators published in 2014 found benefits in safety, performance-based, and patient-reported outcomes. This work updates the previous analysis to the current state of the published evidence.
METHODS:
Systematic review and meta-analysis of the effect of MPKs in limited community ambulators.
RESULTS:
Thirteen research projects presented in 15 publications were identified. Overall validity was "high" in nine studies, "moderate" in three, and "low" in one. The literature described a total of 2366 patients, with 704 classified as limited community ambulators. The use of MPKs in limited community ambulators led to a reduction in falls (SMD g: -0.59; 95% confidence interval (CI) [-0.85, -0.32; I2=0%]), fear of falling (SMD g: 1.2; 95%CI [0.55, 1.85; I2=80%]), risk of falling as indicated by the TUG (SMD g: -0.45, 95%CI [-0.87, -0.02; I2=0%]), an improvement in mobility grade (0.51; 95%CI [0.47,0.55]), self-selected walking speed (SMD g: 0.47; 95%CI [0.14,0.81; I2=0%]), and patient-reported ambulation (MD 9.32; 95%CI [3.61, 15.02; I2=7%]), and utility (MD 7.76; 95%CI [2.05-13.47; I2=0%]). Other outcomes exhibited trends in favor of MPK use or remained insensitive. No outcome was identified favoring non-MPKs.
CONCLUSIONS:
These results suggest that MPKs may be considered a valuable therapeutic option in limited community ambulators with a transfemoral amputation.Implications for rehabilitationAbove knee amputees may be treated with a large variety of artificial exo-prosthetic knee components.Microprocessor-controlled prosthetic knees have proven to be advantageous and cost effective for community ambulators.The current analysis shows similar effects in safety, mobility, and patient perception also for limited community ambulators.Microprocessor-controlled prosthetic knees are a viable therapeutic option for limited community ambulators.
2022-10-01·Prosthetics and orthotics international4区 · 医学
Actual prosthetic usage in relation to functional outcomes and wearing time in individuals with below-elbow amputation
4区 · 医学
Article
作者: Aszmann, Oskar C ; Sturma, Agnes ; Salminger, Stefan ; Mayer, Johannes A ; Papst, Helmut ; Gstoettner, Clemens
Background::
Wearing time of a prosthesis is regarded as an indicator for success of prosthetic rehabilitation. However, prostheses are frequently worn for esthetic purposes only. Although different supervised measurements to assess prosthetic dexterity are used, it is not clear how performance in such tests translates into actual use in everyday life.
Objectives::
To evaluate the actual daily use of the prosthetic device in patients with below-elbow amputations by recording the number of grasping motions.
Study design::
Observational study.
Methods::
Upper extremity function was evaluated using different objective and timed assessments in five unilateral patients with below-elbow amputations. In addition, patients reported daily wearing time, and the number of performed prosthetic movements over a period of at least three months was recorded.
Results::
The patients achieved a mean Southampton Hand Assessment Procedure score of 66.60 ± 18.64 points. The average blocks moved in the Box and Block Test were 20.80 ± 7.46, and the mean score in the Action Research Arm Test was 37.20 ± 5.45. The mean time for the Clothespin-Relocation Test was 26.90 ± 11.61 seconds. The patients reported a wearing time of an average of 12.80 ± 3.11 hours per day. The mean number of prosthetic motions performed each day was 257.23 ± 192.95 with a range from 23.07 to 489.13.
Conclusions::
Neither high functionality nor long wearing times necessitated frequent use of a prosthesis in daily life. However, frequent daily motions did translate into good functional scores, indicating that regular device use in different real-life settings relates to functionality.
100 项与 Otto Bock Healthcare Products GmbH 相关的药物交易
登录后查看更多信息
100 项与 Otto Bock Healthcare Products GmbH 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2025年01月19日管线快照
无数据报导
登录后保持更新
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
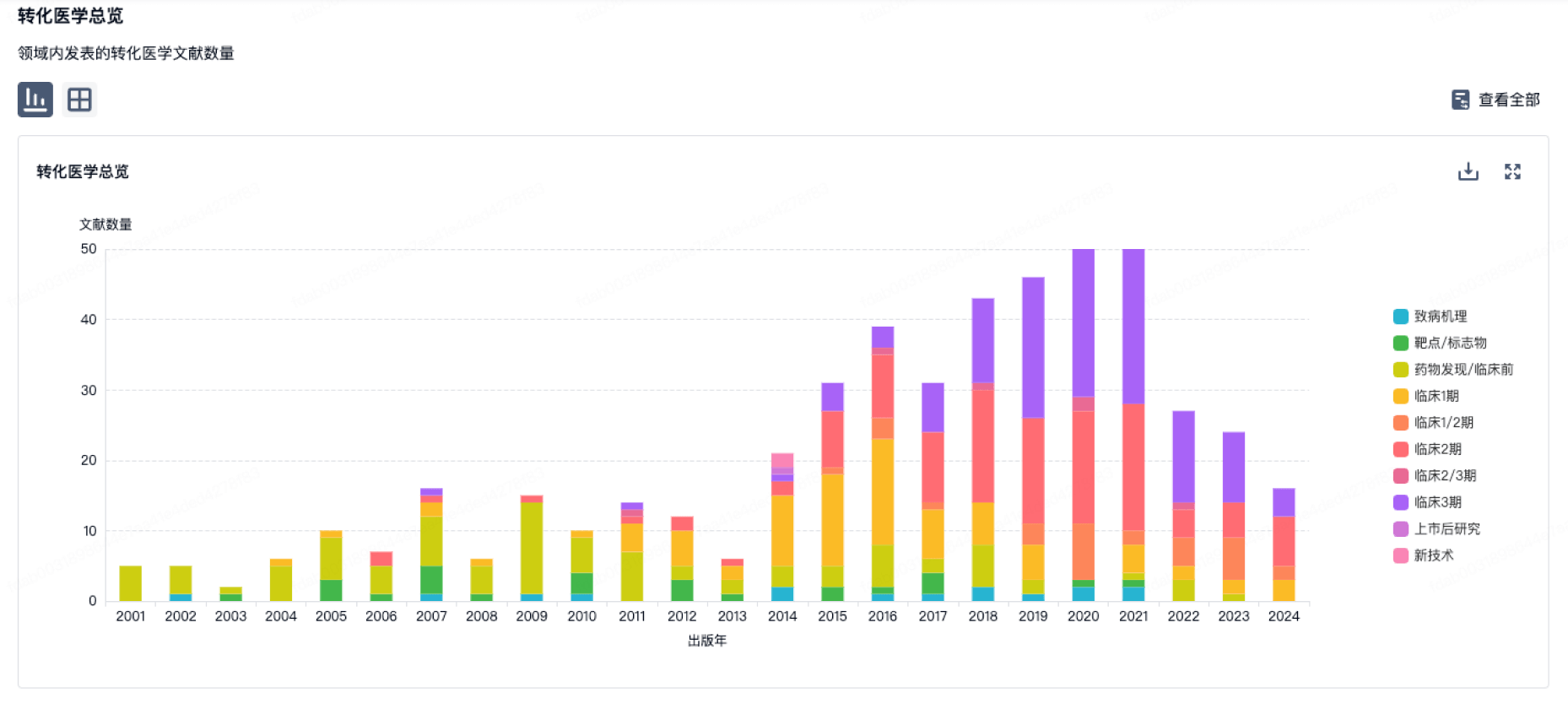
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
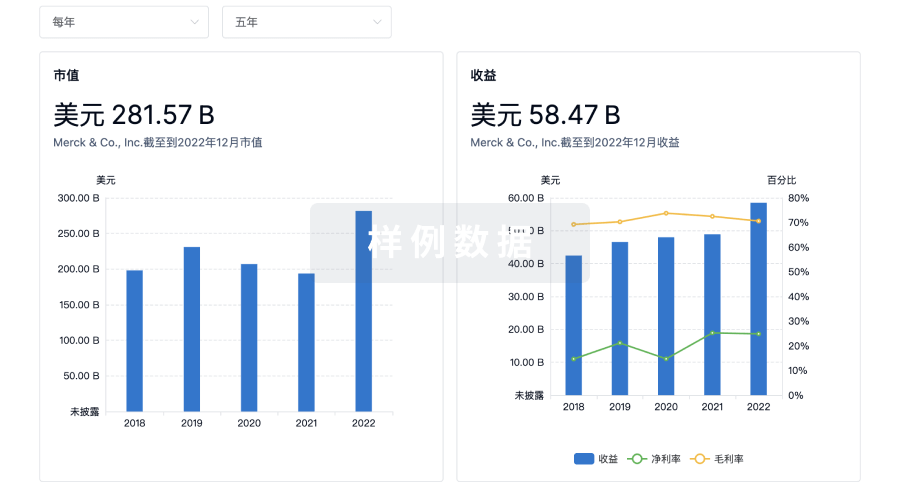
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或
融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
来和芽仔聊天吧
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用