预约演示
更新于:2025-09-09

THINK Surgical, Inc.
更新于:2025-09-09
概览
关联
NCT03017261
TSolution One® Total Knee Arthroplasty Clinical Trial
100 项与 THINK Surgical, Inc. 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2021-07-01Journal of orthopaedics
Safe and effective use of active robotics for TKA: Early results of a multicenter study
Article
作者: Stulberg, Bernard N ; Kissin, Yair D ; Campanelli, Valentina ; Zadzilka, Jayson D ; Long, William J ; Kreuzer, Stefan ; Liebelt, Ralph
BACKGROUND:
A novel active robotic system for total knee arthroplasty (TKA) performs automated milling of bone surfaces. Study objectives were to assess system safety and effectiveness in a US population.
METHODS:
A multicenter clinical trial was conducted, following 115 patients for at least 6-months. A pre-defined list of robot-related adverse events was used to evaluate safety. Efficacy was assessed radiographically comparing planned versus achieved coronal limb alignment.
RESULTS:
No pre-defined adverse events occurred and postoperative limb alignment more than ±3° from plan occurred in 11.2 % of cases.
CONCLUSION:
Active robotics for TKA is safe and effective as demonstrated in this trial.
2020-11-28Surgical technology international
Active Robotic Total Knee Arthroplasty (TKA): Initial Experience with the TSolution One ® TKA System.
Article
作者: Liebelt, Ralph ; Kissin, Yair D ; Auld, Thomas S ; Long, William J ; Campanelli, Valentina ; Kreuzer, Stefan ; Chan, Jason
Several recent advances, including the use of robotic devices, have been explored to improve outcomes in total knee arthroplasty (TKA). The TSolution One ® Total Knee Application (THINK Surgical, Inc., Fremont, CA, USA) introduces an active robotic device that supports an open implant platform and CT-based preoperative planning workflow, and requires minimal surgeon intervention for making bone cuts. Our experience was part of a multi-center, prospective, non-randomized trial assessing the safety and effectiveness of this active robotic system for TKA. Each patient underwent a preoperative CT-scan, which was uploaded to proprietary planning software. The surgeon reviewed the software-generated 3D digital model, selected the appropriate implants and generated a final preoperative plan. Intra-operatively, a standard medial parapatellar approach was used. The leg was then rigidly attached to the robot via fixation pins, and registration markers were placed in the tibia and femur. Landmark registration was performed to inform the robot of the knee's position in space and to confirm the robot's ability to execute the preoperative plan. Next, the robot performed femoral and tibial cuts using a cutter in a sequential fashion along a defined cut-path. The robot was then removed from the operative field and the surgeon completed the procedure by removing marginal bone and performing final balancing and implantation in the usual fashion. The TSolution One® Total Knee Application is a computer-assisted device that potentially allows a surgeon to make more accurate cuts and to determine optimal implant position based on the patient's specific anatomy. It is the only active robotic system currently available. In this manuscript, we describe the operative technique and workflow involved in performing this surgery and offer insight on optimizing safety and efficiency as we introduce new technologies to the operating theater. We also present two cases performed by the senior author to further demonstrate technical aspects of the procedure.
2020-02-01Quantitative imaging in medicine and surgery3区 · 医学
Implant placement accuracy in total knee arthroplasty: validation of a CT-based measurement technique
3区 · 医学
Article
作者: Maislin, David ; Akhlaghpour, Hosna ; Zuhars, Joel ; Lozano, Rocio ; Brar, Abheetinder S ; Campanelli, Valentina ; Nedopil, Alexander J
BACKGROUND:
The primary goal of many computer-assisted surgical systems like robotics for total knee arthroplasty (TKA) is to accurately execute a preoperative plan. To assess whether the preoperative plan was executed accurately in 3D, one option is to compare the planned and postoperative implant placement using a preoperative and postoperative CT scan of the patient's limb. This comparison requires a 3D-to-3D surface registration between the preoperative and postoperative 3D bone models and between the planned and postoperative 3D implants. Hence, the present study aimed at validating this measurement technique by determining (I) the anatomical regions that result in the lowest 6-degree of freedom (DoF) errors for 3D-to-3D surface registration of bone models, (II) the 6-DoF errors for 3D-to-3D surface registration of the implant models, and (III) the 6-DoF of the complete measurement technique.
METHODS:
Four different regions of the femur were tested to determine which one would result in the most accurate 3D-to-3D registration of the bone models using 12 cadaveric lower limb specimens. Next, total knee arthroplasties were performed on six specimens, and the accuracy of the 3D-to-3D implant registration was evaluated against a gold standard registration performed using fiducial markers.
RESULTS:
The most accurate 3D-to-3D bone registration was obtained when using the largest anatomical regions available after TKA, being the full 3D femur model or the femur model without the distal femur which resulted in root mean square errors within 0.2 mm for translations and 0.2° for rotation. The accuracy of the 3D-to-3D femoral and tibial implant registration was within 0.7 mm for translations and 0.4°-0.6° for rotations, respectively. The accuracy for the overall procedure was within 0.9 mm and 0.6° for both femur and tibia when using femoral regions resulting in accurate 3D-to-3D bone registration.
CONCLUSIONS:
In conclusion, this measurement technique can be used in applications where measurement errors up to 0.9 mm in translations and up to 0.6° in rotations in component placement are acceptable.
100 项与 THINK Surgical, Inc. 相关的药物交易
登录后查看更多信息
100 项与 THINK Surgical, Inc. 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2025年09月28日管线快照
无数据报导
登录后保持更新
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
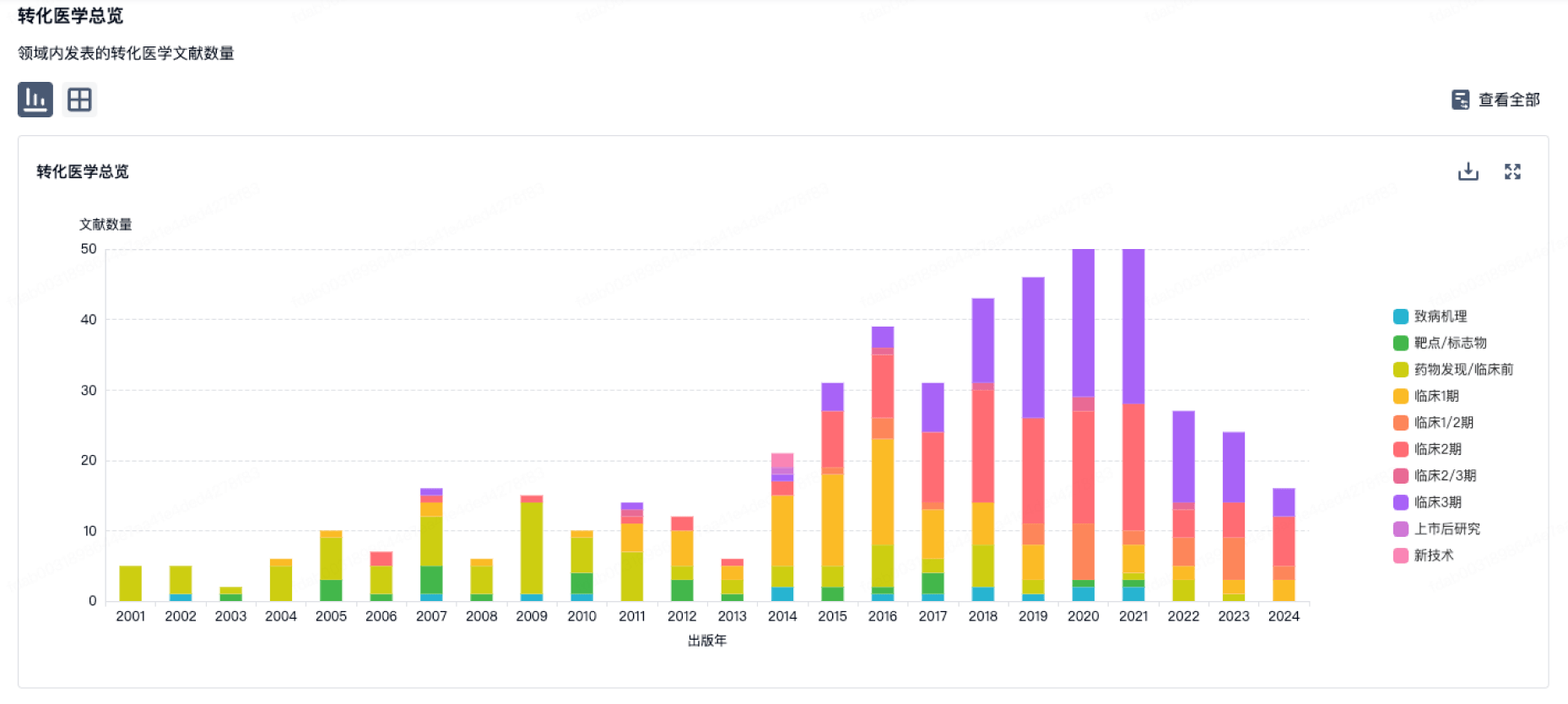
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
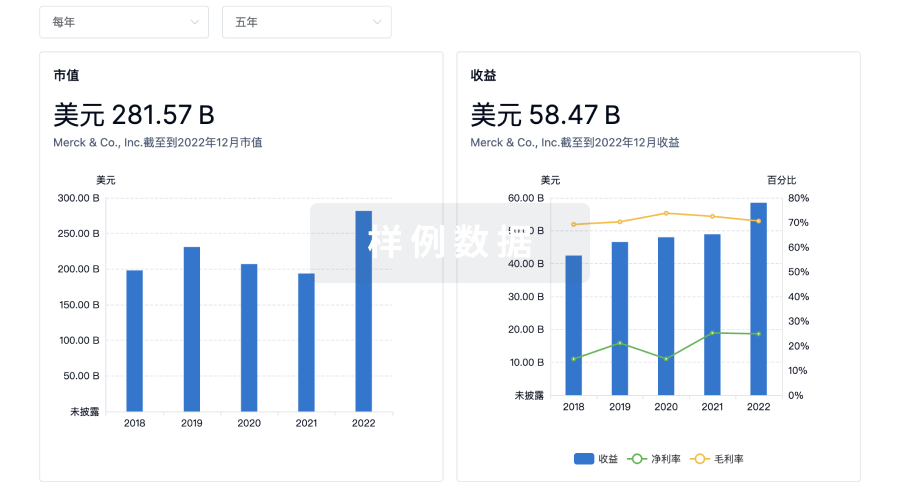
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或
融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
Eureka LS:
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用